 UndistortImage
UndistortImage
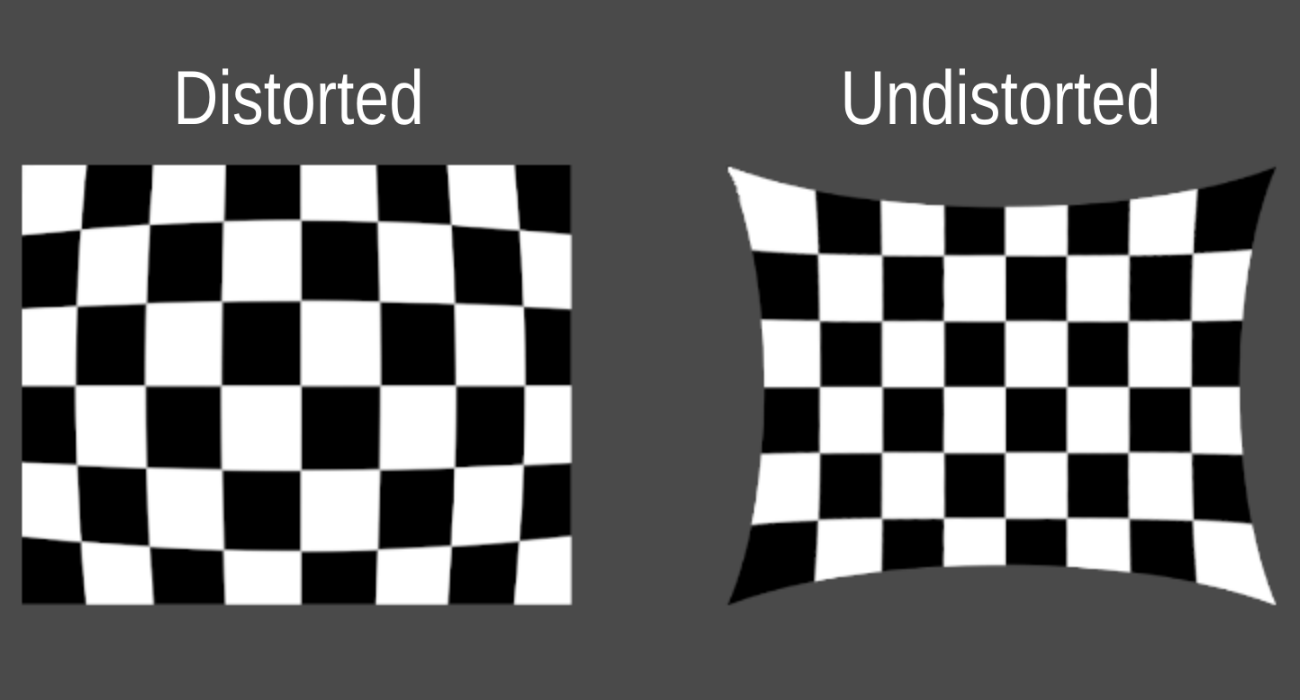
Removes lens distortion using the parameters stored in the calibration camera and crops the selected part of the image.
Note
For more information about the distortion used, see the Camera node.
Attention
When importing camera into the Camera node, make sure you set Import principal point option!
Inputs
- Image
ImageInput distorted image- Camera
CameraCalibration camera
Output
ImageOutput undistorted image
Parameters
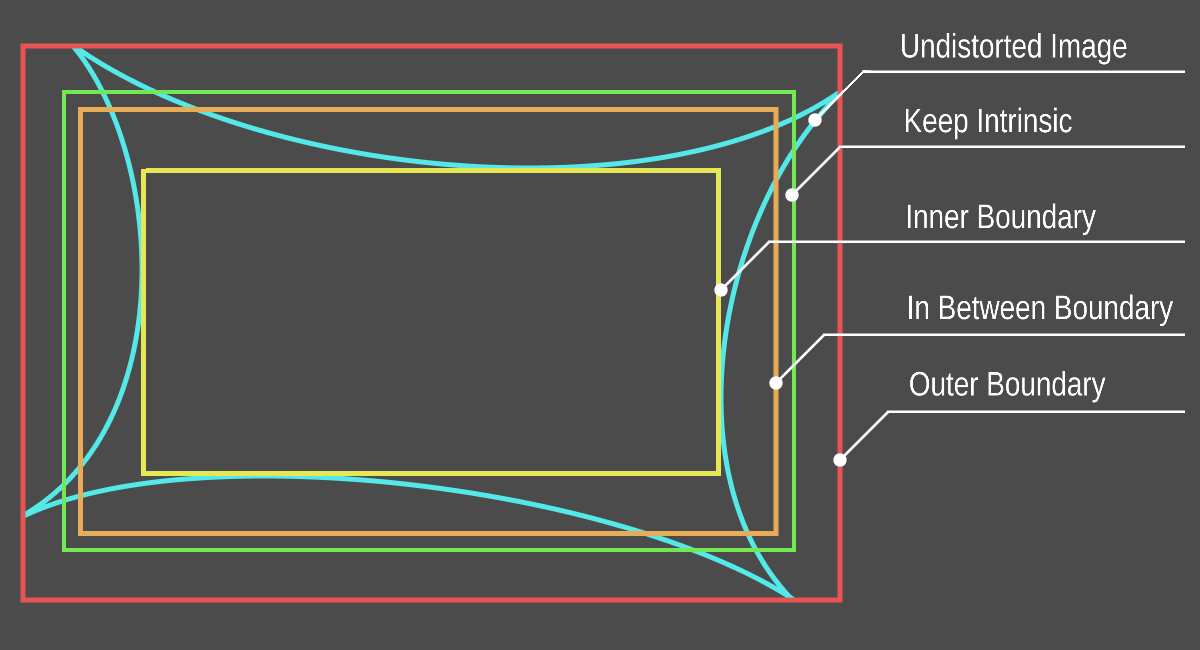
- Boundary Type:
See a scheme below
- Keep Intrinsic
Using camera calibration parameters
- Inner Boundary
Adjust the image to remove any unnecessary pixels, but also some of the image pixels are cropped
- In Between Boundary
Intermediate result between Inner Boundary and Outer Boundary
- Outer Boundary
Adjusts the image so that all pixels in the image are preserved, but areas with unnecessary pixels appear
- Undistortion Method:
- Reality Capture
The undistorted image is similar to the result of Reality Capture
- Reset Optical Center:
If set, the center of the image will match the optical center (In other words, the
Cameraprincipal point will be set at (0, 0))- Accept Zero Distortion:
If not set and all camera distortion coefficients are zero, the node will return an error